JPS 算法
JPS 算法概念基础
- JPS(Jump Point Search,跳点搜索)算法是对
A*算法的一种优化(附A* 算法)。在A*算法中,当前节点周围的所有可搜索邻居都会被加入到 OpenList 中。JPS 算法则在保持 A* 算法基本框架的基础上,采用了一种更为高效的策略来确定哪些点需要被加入到 OpenList 中。这种方法能够显著减少需要评估的节点数量,从而提高路径搜索的效率。
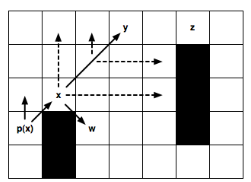
自然邻居
- 自然邻居指的是在路径搜索过程中,某些节点的直接邻居是可以直接移动到达的节点,而不需要经过其他节点的中转。这些自然邻居是基于当前节点的移动方向和位置来确定的。如图所示,红色块是自然邻居(其中 p(x) 为父节点,x为当前节点)。


强迫邻居
- 为了减少需要评估的节点数量,JPS 算法引入了强迫邻居的概念。强迫邻居指的是在路径搜索过程中,某些节点的直接邻居是必须被考虑的,因为它们是达到更远距离节点的必经之路。在 JPS 算法中,强迫邻居用于确保搜索过程不会错过任何可能的路径选择。
- 强迫邻居的定义:当节点 x 的 8 个邻居中存在障碍,且节点 x 的父节点 p 经过节点 x 到达节点 n 的距离代价,总是小于不经过节点 x 到达节点 n 的任意路径的距离代价,则称节点 n 是节点 x 的强迫邻居。简单来讲,节点 x 是从节点 p 到节点 n 的最短路径的必经节点。
- 我们先作一些定义:考虑节点 x 的邻居,节点 x 的父节点记为 p(x), 记经过 x 到达 n 的路径为 path1,不经过 x 到达 n 的路径为 path2
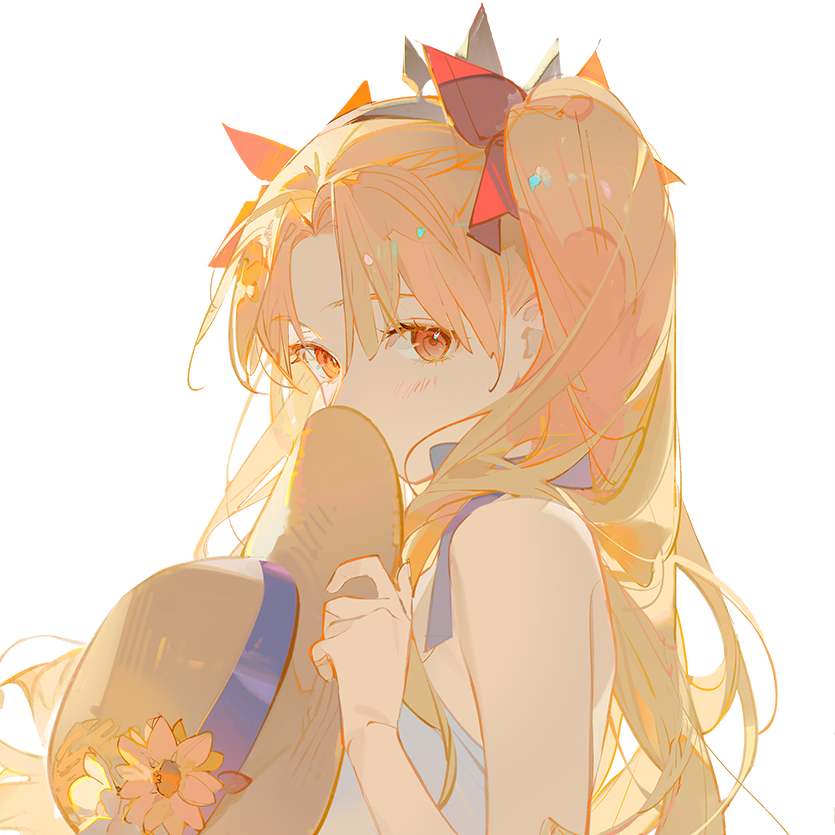
情况一:父子节点是直线关系
- 黑色节点:障碍; 4:父节点; x:子节点。针对图 b,从 4 到 3 的最短路径为:4 → x → 3,因此 3 是节点 x 的强迫邻居
- 如果父子节点之间是直线关系,即父节点经过一次斜线运动可以直接到达子节点,我们不需要考虑存在 path2 小于等于 path1 的邻居。
- 先考虑图(a)的情况,我们修剪除 n = 5 之外的所有邻居。以 n = 3 为例:
- path1 = 4 → x → 3:路径长度为 $ 1 + \sqrt{2} $
- path2 = 4 → 2 → 3:路径长度为 $ 1 + \sqrt{2} $
- 这里path1 == path2,需要将该邻居修剪(拒绝加入 OpenList)
- 因此,对于图(a),x 的下一步应该继续往 5 走,但是不将 5 加入 OpenList。
- 再考虑图(b)带黑色障碍的情况。相比图(a),我们多了个 n = 3 的邻居无法被修剪。
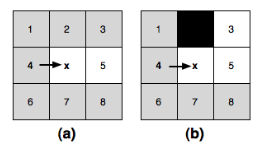
情况二:父子节点是斜线关系
- 黑色节点:障碍; 6:父节点; x:子节点。针对图 d,从 6 到 1 的最短路径为:6 → x → 1,因此 1 是节点 x 的强迫邻居
- 当父子节点是斜线关系时,邻居的修剪规则和直线关系的情况类似,唯一的区别是,此时只修剪存在 path2 严格小于 path1 的邻居。因此,按照此规则,n = 2 和 n = 5 的情况不会被修剪。
- 再考虑图(d)带黑色障碍的情况。相比图(c),我们多了个 n = 1 的邻居无法被修剪。
得到强迫邻居
- 图(a)和图(c)不包含任何障碍,我们将应用直线或对角线修剪后的剩余节点(白色格子)称为 x 的自然节点。灰色格子则是 x 的非自然节点。而对于图(b)和图(d),包含障碍之后,各自有一个非自然节点(分别为 n = 3 和 n = 1)无法被修剪,这两个节点则被称为 x 的强迫邻居。
跳点
跳点的要求
- 当节点 x 满足以下三个条件之一,则称节点 x 为跳点:
- 节点 x 是起始点或目标点
- 节点 x 至少有一个强迫邻居
- 如果节点 x 的父节点 p(x) 到节点 x 是对角线移动,且 x 可以通过水平或垂直方向的移动到达另一个跳点,则节点 x 也是跳点。
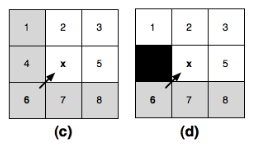
识别跳点的例子
- 从 x 开始,水平和垂直方向都没有遇到跳点,因此沿着对角线行进。继续重复水平、垂直、对角线。直到到达节点 y。
- 从节点 y 开始,水平移动 2 格,到达节点 z。节点 z 是跳点,且根据条件 3,节点 y 也是跳点。
算法流程
- 有了跳点的概念之后,接下来我们就可以介绍 JPS 算法的具体流程:
- 初始化:将起点加入到 OpenList 中。
- 搜索跳点:
- 从 OpenList 中取出具有最小 f 值的节点作为当前节点(这部分和 A* 算法一样),并将其加入到 CloseList 中
- 搜寻当前节点的自然邻居和强迫邻居
- 遍历所有自然邻居和强迫邻居,根据邻居方向开始往水平 || 垂直 || 对角线方向搜索跳点。对角线方向的搜索需要先检查当前邻居是否有强迫邻居,如果有则将当前邻居加入到 OpenList 中,并停止当前方向的搜索。否则优先考虑水平分量,然后是垂直分量。如果找到跳点,则将该跳点加入到 OpenList 中,并停止当前方向的搜索。
- 重复搜索:重复执行搜索跳点步骤,直到找到目标点或 OpenList 为空。
- 下面是搜索挑点步骤中第二点(评估当前节点的邻居方向)和第三点(跳点)的代码实现:
1 | /// <summary> |
1 | /// <summary> |
JPS 相比 A* 算法的优势
- 效率提升:JPS算法通过只扩展关键的跳点(即路径改变方向的点),而不是每个可能的节点,从而显著减少了 OpenList 中节点的数量,提高了搜索效率。
- 内存使用降低:由于 OpenList 中节点数量的减少,JPS算法在内存使用上也更加高效。
- 适用于大规模地图:JPS 算法在大规模地图上的表现尤为出色,因为它能够快速地跳过大片可行走区域,而不需要逐个节点地进行评估。
JPS 相比 A* 算法的劣势
相关推荐

评论